利用人工智能驱动的 3D 传感技术实现卡车载荷测量的现代化
Tolveet采用专有的多传感器三维传感和边缘人工智能技术,进行实时、动态和静态扫描。获得精确的装载量、材料分类和 满负荷审计 在一个紧凑的系统中。
使用以下设备升级您的卡车装载工作流程 投资回报率更快,风险最小.
预约现场演示传统的体积激光扫描仪 Tolveet 采用单平面二维激光雷达和移动式光学元件,在灰尘、雨水、眩光和振动环境下也能保持精确度。Tolveet 是完全三维和多传感器的,在不同的现场速度和条件下都很精确,具有更丰富的数据和零移动部件。

如何工作实时人工智能 3D 感知
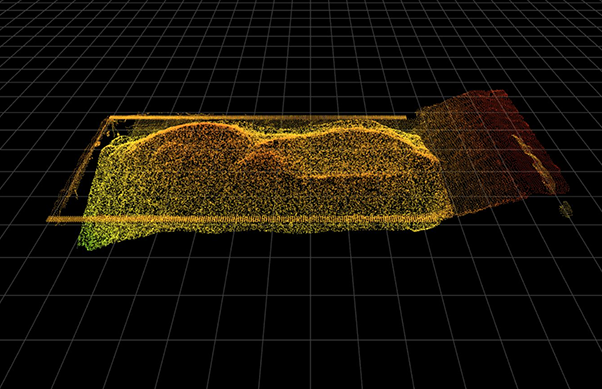
坚固耐用的 11 千克杆式安装模块保险丝 激光雷达 + 立体相机 设备上。Edge AI 能为每个通道生成带标签的实时3D网格,计算实际装载量(包括冷启动时无空桶的估算),并对材料进行分类,提供不受湿度影响的精准测量,无需移动部件或外部PC。
通过 3D 模型、真实体积和自主卡车识别进行端到端装载审核,确保设备安全,并与我们的报告/API 同步。在任何环境条件下均可靠。
差异
| Tolveet 容量扫描仪 | 传统激光体积式扫描仪 | |
|---|---|---|
| 多传感器冗余 | 互补式 3D 传感器协同工作;当灰尘、雨水、强光或夜幕降临阻碍其中一个传感器时,另一个传感器就会填补空白。 | 单平面二维激光雷达 .在大雾、刮风、反光载荷或光线不足的情况下,性能会迅速下降;操作员通常会让车辆减速。 |
| 扫描模式 | 动态和静态 在一个设备中实现(可通过软件选择):动态 = 驱动通过;静态 = 短暂停止,以达到最高精度。 | 单模 每次安装;切换模式需要新的硬件和重新校准。 |
| 尺寸 | 621 × 248 × 210 毫米、 11 千克.可安装在灯杆或现有龙门架上。 | 40-60 公斤重的激光头,外加加固结构和混凝土底座。 |
| 总拥有成本 | 最多 资本支出降低 10 倍无外部 PC,无移动部件,包括 OTA 更新。 | 每条车道 4.5-1.1 万美元,外加一台工业 PC 和移动光学设备的定期维护。 |
| 数据深度 | 贴有标签的三维网格(卡车、有效载荷、运回)、材料分类、RFID/QR/ANPR 连接和持续的计算机视觉升级,包括自动装载量测量。 | 仅提供数量概况;可追溯性和分类是可选的附加功能,或者根本无法提供。 |
| 准确性 | 正常运输速度下为 ± 2 %(LVS 型)或 ± 1 %(LVS-F 型)。 | 标称 ± 1-3%,但只有当卡车在刚清洁过的激光头下行驶时才能达到;灰尘、振动或正常行驶速度会迅速降低精度。 |
| 可扩展性和升级 | 人工智能优先方法 扫描模式:从每次扫描中不断学习,并通过无线更新推出,为未来在相同硬件上增强计算机视觉能力留出余地。 | 受硬件限制的二维激光雷达设计;有意义的改进通常需要新的传感器或更换整个系统。 |


卡车载荷测量常见问题
什么是卡车装载量和卡车卧铺容积测量?
卡车装载量指卡车运载材料的实际体积,通常以立方为单位(如立方码或立方米)。车床容积指卡车车床的总容量。现代系统可以在车辆行驶过程中捕捉卡车有效载荷的全三维轮廓,从而精确测量所运输的物料体积。
以公路运输速度进行实时负载扫描的准确性如何?
Tolveet专有的三维传感系统可在全速牵引的情况下提供±2%的容积精度,通过增强冗余(LVS-F型),还可提供更高的精度。
灰尘、雨水或强光是否会影响自动负载体积测量?
当一个传感通道因灰尘、雨水或光线不足而减弱时,另一个传感通道会进行补偿,以保持稳定的音量精度。
除了真正的体积测量,您还能在没有空桶参照物的情况下测量体积吗?
是的。冷启动人工智能使用我们持续增长的数千辆卡车几何形状库,而不仅仅是您的车队,来推断空车形状并计算第一天的运量(无空车运行)。
扫描仪能否识别材料类型和体积?
是的。人工智能模型可实时对集料、矿石或沙子进行分类,在三维卡车网格上叠加材料类型,并将结果导出到您的门户网站。
卡车载荷测量如何帮助降低运输成本?
准确的装载数据可避免装载不足,防止超重罚款,并为调度软件提供实时装载量,提高车队利用率和燃油效率。
系统是否与用于卡车识别的 RFID、QR 码或 ANPR 兼容?
完全正确。扫描仪通过 RFID 标签、QR 贴纸或车牌识别,自动将每个 3D 模型与卡车 ID 关联,实现端到端的可追溯性。