Modernize a medição de carga de caminhões com sensoriamento 3D impulsionado por IA
O Tolveet utiliza sensoriamento 3D multissensor proprietário e IA de edge para digitalização estática e em movimento em tempo real. Obtenha volume de carga preciso e classificação de material. auditoria de carga total em um sistema compacto.
Atualize seus fluxos de trabalho de carga de caminhão com ROI mais rápido e risco mínimo.
Agende uma demonstração ao vivoScanners volumétricos a laser antigos O Tolveet não utiliza LiDAR 2D de plano único com óptica móvel; a precisão é prejudicada por poeira, chuva, brilho e vibração. O Tolveet é totalmente 3D e multissensorial, preciso em velocidades e condições variáveis do local, proporcionando dados mais ricos e sem partes móveis.

Como funciona: Sensoriamento 3D com IA em tempo real
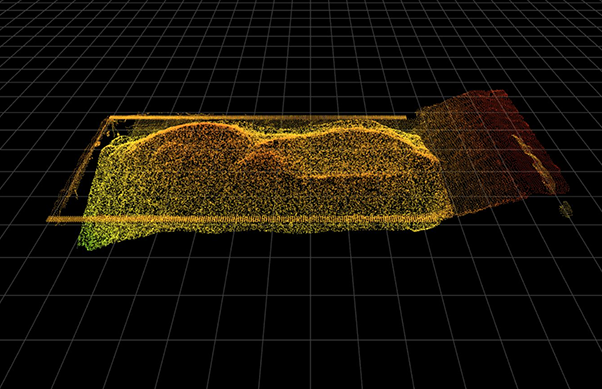
Um módulo de fusíveis robusto, de 11 kg, montado em poste LiDAR + câmeras estéreo no dispositivo. O Edge AI gera uma malha 3D rotulada em tempo real a cada passagem, calcula o volume de carga real aferido (incluindo estimativas de partida a frio sem uma caçamba vazia) e classifica o material, oferecendo precisão independente da umidade, sem peças móveis ou PC externo.
Auditoria de carga ponta a ponta com modelos 3D, volume real e identificação autônoma de caminhões, protegida no dispositivo e sincronizada com nossos relatórios/APIs. Confiável em qualquer condição ambiental.
Diferenças
| Tolveet Load Volume Scanner | Scanners a laser volumétricos legados | |
|---|---|---|
| Redundância de vários sensores | Sensores 3D complementares operam em conjunto; quando poeira densa, chuva, brilho ou anoitecer prejudicam um deles, o outro preenche as lacunas. | LiDAR 2-D de plano único O desempenho diminui rapidamente em caso de neblina, poeira, cargas reflexivas ou pouca iluminação; os operadores costumam reduzir a velocidade dos veículos. |
| Modo de varredura | Em movimento e estático em um único dispositivo (selecionável via software): In-Motion = passagem; Static = pausa breve para máxima precisão. | Modo único por instalação; a alteração de modos exige novo hardware e recalibração. |
| Dimensões | 621 × 248 × 210 mm, 11 kgPode ser instalado em um poste de luz ou em um pórtico existente. | Cabeça de laser de 40 a 60 kg, com estrutura reforçada e base de concreto. |
| Custo total de propriedade | Até CapEx 10 vezes menorNão há PC externo, peças móveis ou atualizações OTA incluídas. | US$ 45 mil a US$ 110 mil por unidade, além de um PC industrial e manutenção regular da óptica móvel. |
| Profundidade dos dados | Malha 3D etiquetada (caminhão, carga útil, transporte), classificação de materiais, integração RFID/QR/ANPR e atualizações contínuas de visão computacional, incluindo medição automática de volume de carga. | Somente perfil de volume; rastreabilidade e classificação são opcionais ou indisponíveis. |
| Precisão | ± 2 % (Modelo LVS) ou ± 1 % (Modelo LVS-F) na velocidade padrão de transporte rodoviário. | Anunciado ± 1-3%, mas alcançado apenas quando os caminhões se movem lentamente sob um cabeçote de laser recém-limpo; poeira, vibração ou velocidade normal de deslocamento reduzem rapidamente a precisão. |
| Escalabilidade e atualizações | Abordagem que prioriza a IA Os modelos de visão computacional continuam aprendendo a cada varredura e são implementados por meio de atualizações over-the-air, permitindo aprimoramentos futuros de visão computacional no mesmo hardware. | Projeto LiDAR 2D com limitações de hardware; melhorias significativas normalmente exigem novos sensores ou a substituição completa do sistema. |