تحديث قياس حمولة الشاحنة الخاصة بك
يوفر الماسح الضوئي الثلاثي الأبعاد المعزز بالذكاء الاصطناعي بيانات أغنى، عائد استثمار أسرع، ومخاطر تشغيلية أقل مقارنة بأجهزة الليزر التقليدية المثيلة. تقدم وحدة مدمجة واحدة في الحركة قياسات الحجم في الوقت الحقيقي، والتصنيف التلقائي للمواد و التدقيق في حمولة الشاحنة بالكامل.
احجز عرضاً تجريبياً مباشراًيقارن هذا المنشور بين ماسحات ضوئية ليزر حجمية قديمةتم تقديم الأنظمة التي تعتمد على رؤوس LiDAR أحادية الخط أو الدوارة منذ أكثر من عقد. الجيل التالي من تقنية الرؤية بالذكاء الاصطناعي هدفنا هو تحديد نقاط القصور في الأجهزة التقليدية وتسليط الضوء على المكاسب القابلة للقياس الكمي التي يمكن تحقيقها من خلال التحول إلى القياس غير المرئي.
على الرغم من اختلاف تصميم أجهزة الليزر القديمة، إلا أنها تشترك في نفس العيوب: بصرية ثقيلة، أجزاء متحركة، كمبيوتر خارجي، وقدرة محدودة على إضافة ميزات الرؤية الحاسوبية الحديثة مثل القياس التلقائي لحجم الحمولة أو الدقة المستقلة عن الرطوبة. يستبدل جهاز Tolveet هذه البنية بحجرة رؤية مجسمة مدمجة - يمكن دمجها اختياريًا مع جهاز LiDAR ذو الحالة الصلبة - مما يوفر رؤية ثلاثية الأبعاد ذات علامات ونتائج فورية ومراقبة عن بُعد بجزء بسيط من المساحة وتكلفة العمر الافتراضي.

الاختلافات
| Tolveet LVS/ LVS-F | ماسحات ضوئية ليزرية حجمية قديمة | |
|---|---|---|
| تكرار دمج المستشعرات الزائدة عن الحاجة | تعمل تقنية الرؤية المجسمة وحالة الحالة الصلبة LiDAR معًا كوحدة مترابطة. عند مواجهة عوائق مثل الغبار الكثيف أو المطر أو التوهج أو الظلام ليلاً، يتولى أحد المستشعرات تعويض أداء الآخر. | رادار ضوئي ثنائي الأبعاد أحادي المستوى ثنائي الأبعاد . ينخفض الأداء بسرعة في حالات الضباب أو الغبار المتطاير أو الأحمال التي تعكس الضوء أو في ظروف الإضاءة المنخفضة، وغالباً ما يؤدي ذلك إلى تباطؤ سرعة المركبات من قبل المشغلين. |
| الأبعاد | 621 × 248 × 210 مم, 11 كجم. يتم تركيبها على عمود إنارة أو على عمود إنارة قائم. | رأس ليزر بوزن 40-60 كجم مع هيكل مقوى وقاعدة خرسانية. |
| التكلفة الإجمالية للملكية | حتى 10 أضعاف النفقات الرأسمالية المنخفضة؛ لا يوجد حاسوب خارجي، ولا أجزاء متحركة، وتتضمن التحديثات عبر الهواء. | ٤٥ ألف دولار أمريكي - ١١٠ آلاف دولار أمريكي لكل حارة، إضافة إلى كمبيوتر صناعي وصيانة دورية للبصريات المتحركة. |
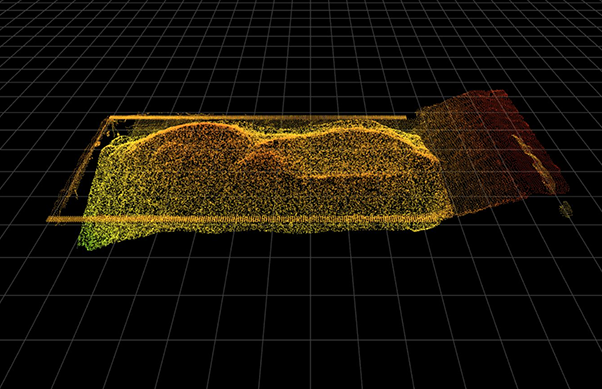
| عمق البيانات | شبكة ثلاثية الأبعاد تتضمن (شاحنة، حمولة، حمولة محمولة)، تصنيف المواد، وربط نظام تحديد الهوية بالترددات اللاسلكية وتحديثات مستمرة للرؤية الحاسوبية، بما في ذلك القياس التلقائي لحجم الحمولة. | ملف تعريف الحجم فقط؛ تتبع وتصنيف غير ضروري أو غير متوفر. |
| الدقة | ± 2 % (الرؤية) أو <± 1 % (الاندماج) عند السرعة العادية للنقل على الطريق. | معلن عنها بنسبة ± 1-3٪، لكن لا يمكن الوصول إليها إلا عندما تسير الشاحنات تحت رأس الليزر الذي تم تنظيفه حديثًا؛ إذ إن الغبار أو الاهتزاز أو السرعة العادية للحركة تؤدي سريعًا إلى تدهور الدقة. |
| قابلية التوسع والتحديثات | نهج الذكاء الاصطناعي أولاً تتعلّم النماذج من كل عملية مسح، ويجري تحديثها عبر الهواء، مما يتيح تحسينات مستقبلية للرؤية الحاسوبية على الأجهزة نفسها. | تصميم نظام LiDAR ثنائي الأبعاد متكامل مع الأجهزة؛ عادة ما تتطلب التحسينات الهامة استخدام مستشعرات جديدة أو استبدال النظام بالكامل. |